Deep Learning II - MLP 和 CNN
这是 2025 春 计算机视觉导论的笔记
Todo:
- 内容杂乱无章,十分愚蠢,或许未来会润色语言使它便于阅读
接上节:线性模型的 capasity/expressivity 太小了!
Multi-Layer Perceptron (MLP)
- 线性层堆叠没有意义:\displaystyle \mathbb{R}^{c_{1}} \to \mathbb{R}^{c_{2}} \to \mathbb{R}^{c_{3}} 仍然是线性的,堆 non-linear 的东西才有用

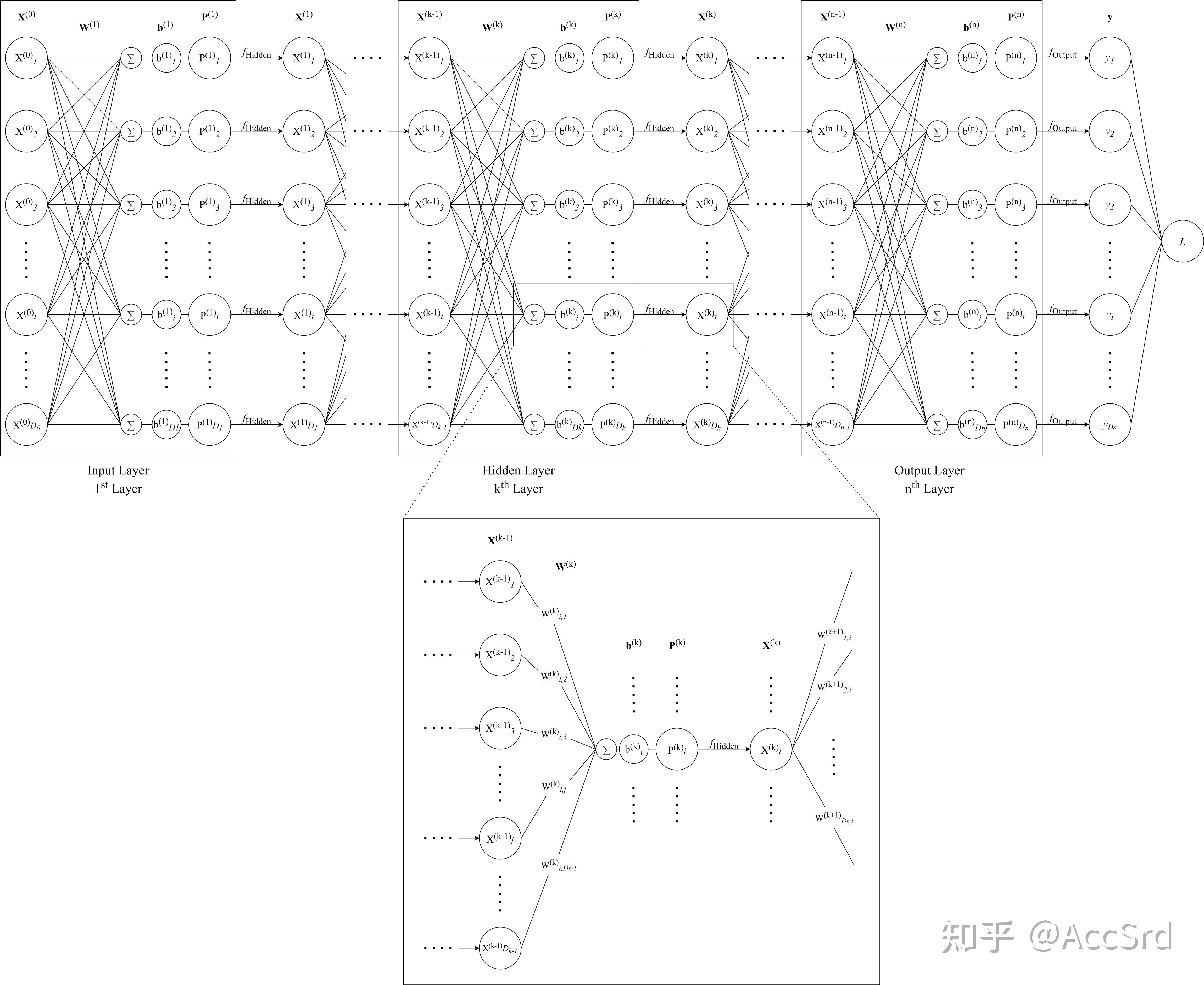
有意义的 \displaystyle g- 要做的事:Input -> flatten -> Hidden Layer -> Output
- fully-connected 全连接层,下一层的所有neuron都连接到上一层的所有neuron
- Hidden Layer 的选择:选 Input 和 Output 之间的一个值,或许从信息凝聚的角度解释
- 范式
- Initialization: randomly generate \displaystyle \boldsymbol{W}_{1}\in \mathbb{R}^{784\times 128} and \displaystyle \boldsymbol{W}_{2}\in \mathbb{R}^{128\times 10}
- Forwarding(前向传播)
- Gradient Descent: Update weights
- Backpropagation
- 我们已经不太好给出多层情况下 Gradient 的解析形式
- Chain Rule
- Upstream gradient 一步步与中间的 Local Gradient 相乘最后回到第一层
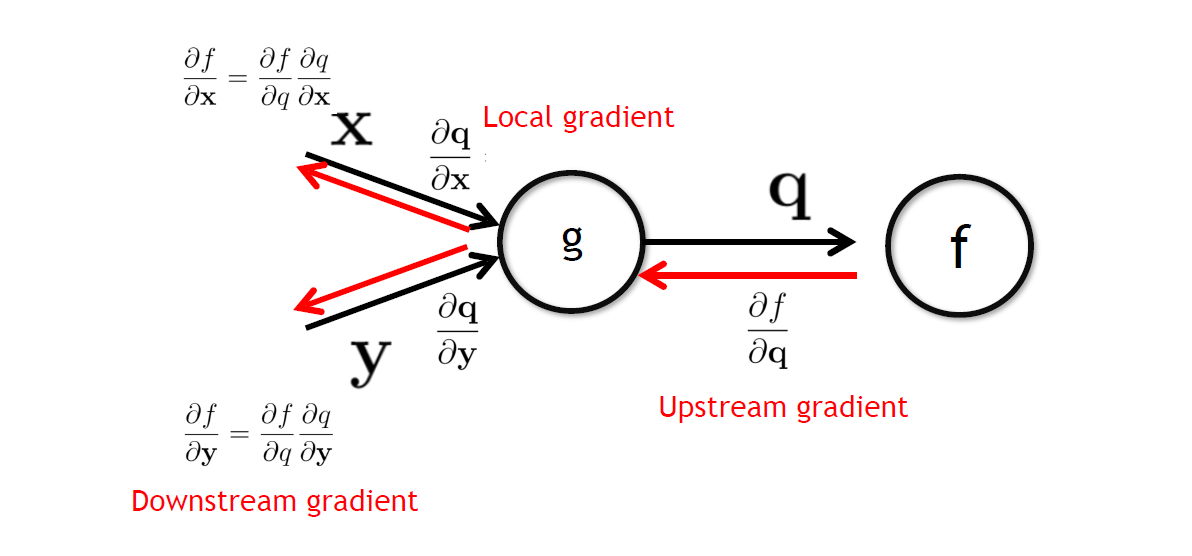
- 这样实现了自动微分机制 Auto Differentiation,Computational Graph -> Diff.
- Upstream gradient 一步步与中间的 Local Gradient 相乘最后回到第一层
- Activation Function
- 之前用到 Sigmoid 是把 \displaystyle \mathbb{R} 映到 \displaystyle [0, 1]
- 这里的激活函数是用来实现 non-linear 的 neuron,因为有non-linear,所以有一切函数

- 选\displaystyle \tanh?不会丢掉一半区间;选\displaystyle \text{ReLU}?事实上只要不是全线性,就不会退化为一个线性层,这样可以简化计算;
- Optimization上,ReLU负位置的前面的neuron在BP时干脆可以直接丢掉了,不被Update;引入Leaky ReLU使得BP时所有neuron都被update
- 为什么大家还是愿意使用ReLU?在正位置性质足够好;可以从生理上理解;Rectified Linear Unit
- tricky要用到更加好的optimization,比如leaky relu;但是对于分类这样的问题,relu就足够好
结语
- MLP 采用的 Model:Input -> function: Hidden Layer(non-linear) -> Output
- 如何让 function 足够 non-linear:非线性的激活函数的叠加
- MLP 结构 & Chain Rule:Initialization -> Forwarding -> Backpropagation
Convolutional Neural Network
- MLP Problems
- Deep Learning I 中学习了 FC 全连接网络
- MLP 由多层的 FC 构成,也有人管 MLP 叫 FC
- MLP 用最丰富的神经连接相连接的神经层,很贵,适于处理密集的数据;flatten也很不讲道理,破坏了图片的结构;矩阵\displaystyle \boldsymbol{W}也非常巨大,参数量很恐怖
- CNN
-
卷积操作
- 卷积核kernal/filter参数通过学习得到(一个convolution kernal应该是C个filter)
- 不严格遵循卷积规则:直接对位相乘;但其实仍严格符合数学的卷积定义
- 考虑 image(\displaystyle 32\times 32 \times 3) 和 filter(\displaystyle 5 \times 5 \times 3) 之间的点积,最后得到\displaystyle 32 \times 32 \times 1(channel=1)的结果
- 这时候filter是否各向同性都无所谓了,与要抽取的特征有关
- filter可以再加bias => \displaystyle w^{T}x+b
- share1个bias 还是 \displaystyle 32\times 32 \times 3个bias还是 \displaystyle 5\times 5 \times 3个bias?
- 结果是共享同一个bias
- 其他的选择:不符合Conv的规则,破坏卷积的平移等变性
- 角落上的Conv:最原始的大小缩减作用
-
可以由多个filter各对image卷积一次,得到一组activation maps/feature maps
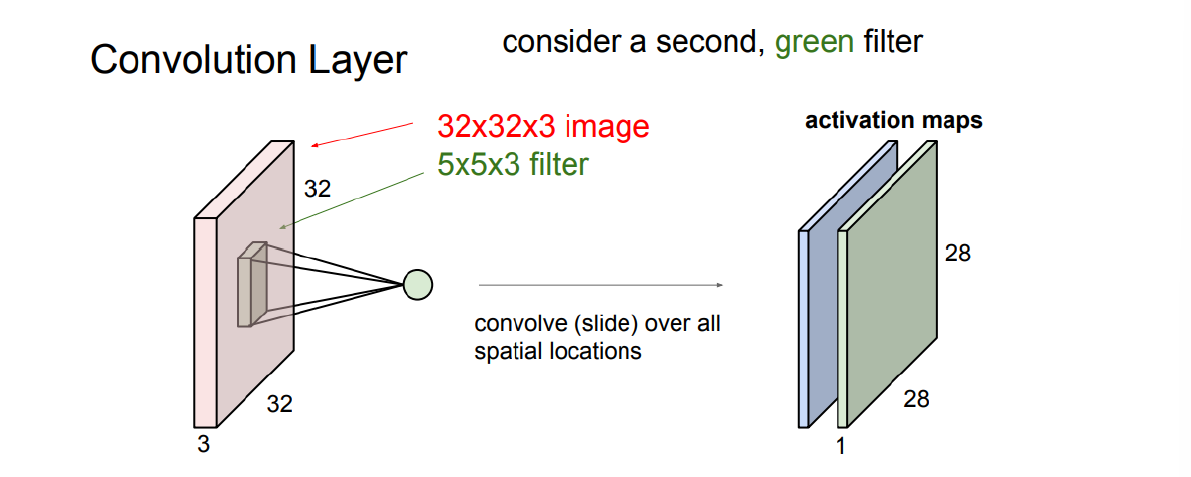
信息从局部语义向更高维的空间移动
-
完成Conv后一定要做ReLU:两次线性操作之间
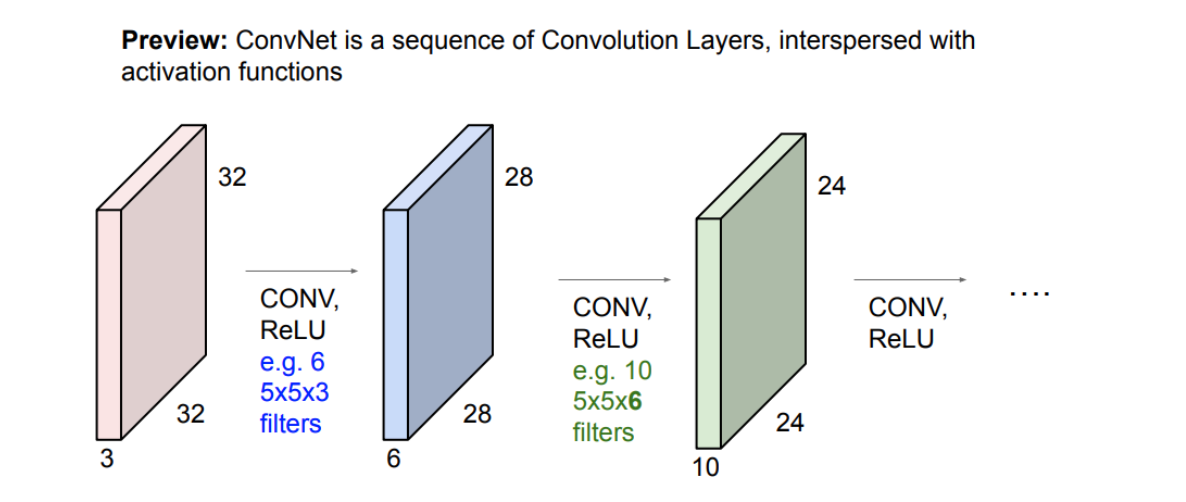
-
最后还是用一个Linearly separable classifier(FC)得到结果
- ReLU的意义:feature extract,杀掉neuron
- bias的意义:决定杀掉哪些neuron
-
- 步长 Stride:增强大小缩减作用 => 不匹配时就会损失信息
- Output size: (N - F) / stride + 1 => 不匹配就得到非整数
- 补救手段:padding
- zero
- Output size' = (N + 2P - F) / stride + 1, 其中 P = (F - 1) / 2 会实现输入输出dimension不变 (这很好 :P)
- parameters number:
filter_num * (x * y * channels + 1)- CNN 大大减少了 parameters 数量!
- Common Setting:取channel数为powers of 2,filter size是奇数(容易padding)
- 池化 Pooling
- 池化真是莫名其妙的翻译,这是另一种大小缩减方法
- e.g. MAX Pooling 在每一个 2 \displaystyle \times 2 filter 里取最大的那个(信息损失还好,因为只要不是第一层Conv,这个 MAX 就是先前周围几块通过filter综合得到的)
Average Pooling 等价于一个 \displaystyle \begin{matrix}1 & 1 \\ 1 & 1\end{matrix} 的 \displaystyle 2 \times 2 filter, stride = 2 - 处理奇数情况:\displaystyle W^{\prime}=\left\lceil \frac{W}{2} \right\rceil
- 应用例:Style -> Average Pooling Classification -> MAX Pooling
Comparison
- FC and ConvLayer
- FC: fully/densely connect
- ConvLayer: 一个输出cell只和周围filter size内的输入有关,parameters远少于FC => 计算开销
- 近场效应 Sparse Connectivity => 信息蔓延的过程 (受到了来自 transformer 的挑战)
- Parameter Sharing => 这是Conv与生俱来的
- FC and CNN: which is more expressive?
- FC is super set of CNN: FC 显然可以表达所有的 Conv(只需要non-sparse的神经weight为0)
- FC is worse than CNN: MLP 在训练集上的 accuracy 都会不高,更不用说过拟合:在巨大的空间中有过于多的local minima,param太多了
- 识别猫猫:背景/角度/光照变化太多,网络应该对这些因素具有robust => CNN天然
例子: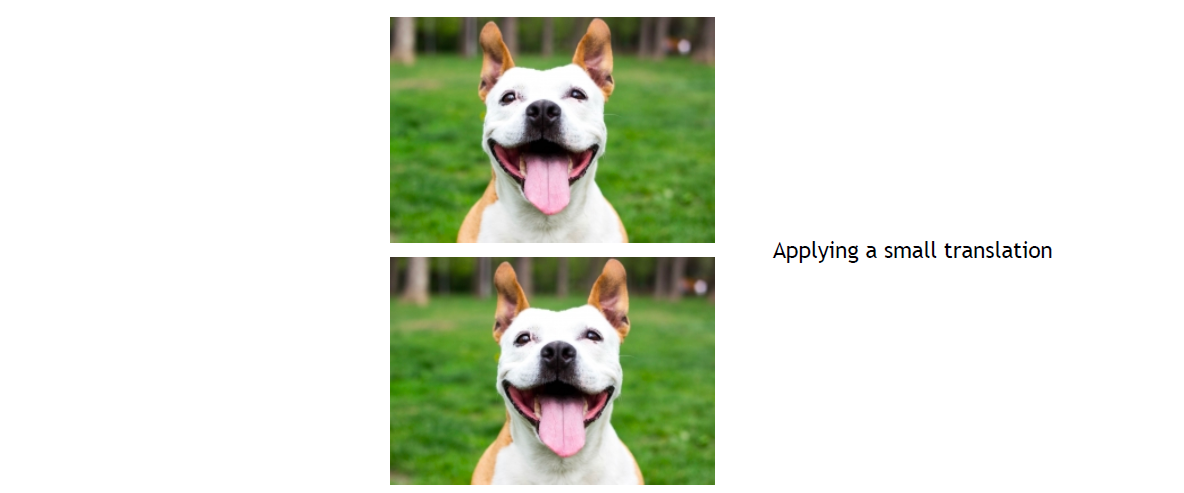
对FC来说Input翻天覆地了! - CNN对transform是Equivariance的:S_{A}[\phi(X)]=\phi(T_{A}(X))
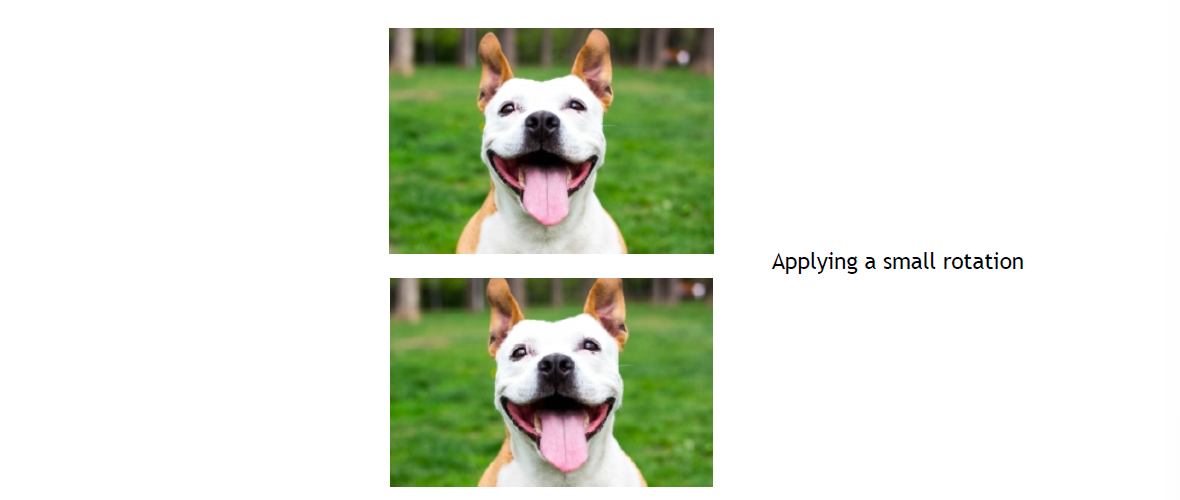
rotation如果是isometric的那么是equivariance的,但大概率filter不是isometric的,那么rotation可能就没有equivariance,但小的rotation下 Pooling 会对rotation有一定的robust - 这 终于! 特别好地回答了为什么要 parameter sharing
- 结论:CNN with ConvNet 和 pooling layer 对 translation 很好地 invariance,rotation有一点点invariance;CNN在各处有相似质量的local minima