我们很早地开始讲 3D Vision 是因为要引入多模态 modality
3D Data
- 我们把3d representation分成implicit隐式立体和explicit显式立体
- implict:例如双目视觉通过双眼视角差产生立体视觉就是隐式3d,并不精确,是相对感知;为什么相对感知能完成生活中的各种任务?老师的解释是人眼在进行连续观测,在伸手的过程中能不断修正
- explicit:Depth Cam/LiDAR都是RGB+Depth的,给出显式的精确的深度信息;总之,这样的3d data既有regular data(multi-view的,rgbd的,体素的),也有irregular data(经典的三角面/四边面mesh,点云point cloud)
Camera Model
我们其实在图形学里学过这个:从观察空间到屏幕空间的投影矩阵
- 建立相机Model的Idea
- 空气中的一张相纸?不可以,相纸上的每个点会接收到世界上各处射来的所有光,不同来源的光混杂在一起,不能成像
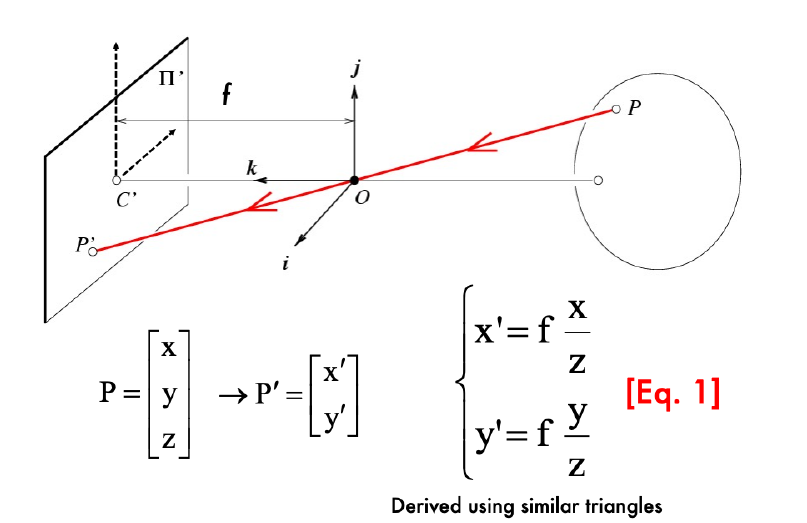
- Pinhole camera:一个相机模型可以数学化为\displaystyle f\left(\begin{bmatrix}x \\ y\end{bmatrix}\right)=\begin{bmatrix}x \\ y \\ z\end{bmatrix},Pinhole Camera是
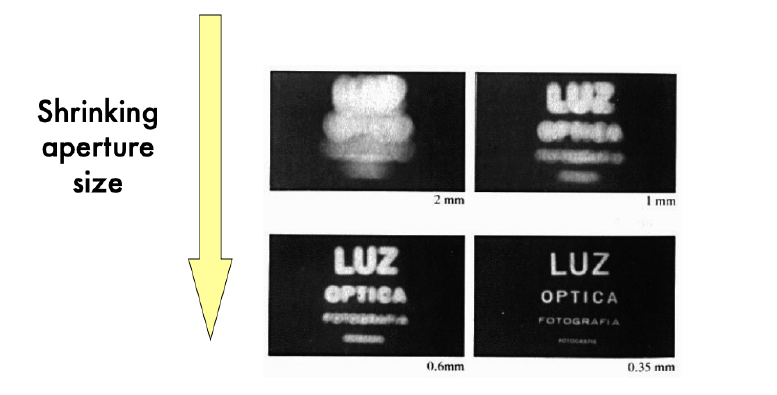
- Pinhole Cam Cons:只有无限小的小孔能让一个位置的光只来自于一点;减小aperture size又与光度矛盾
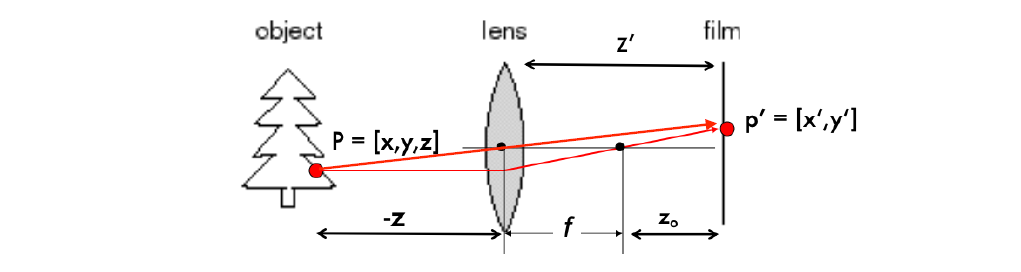
- Paraxial Refraction Model 近轴折射模型:根据所有平行光通过lense会汇聚在焦点上,物点记作\displaystyle [x,y,z],像点记作\displaystyle [x^\prime,y^\prime], 有\displaystyle \frac{x^\prime}{z^\prime}=\frac{x}{z}, \displaystyle \frac{y^\prime}{z^\prime}=\frac{y}{z}
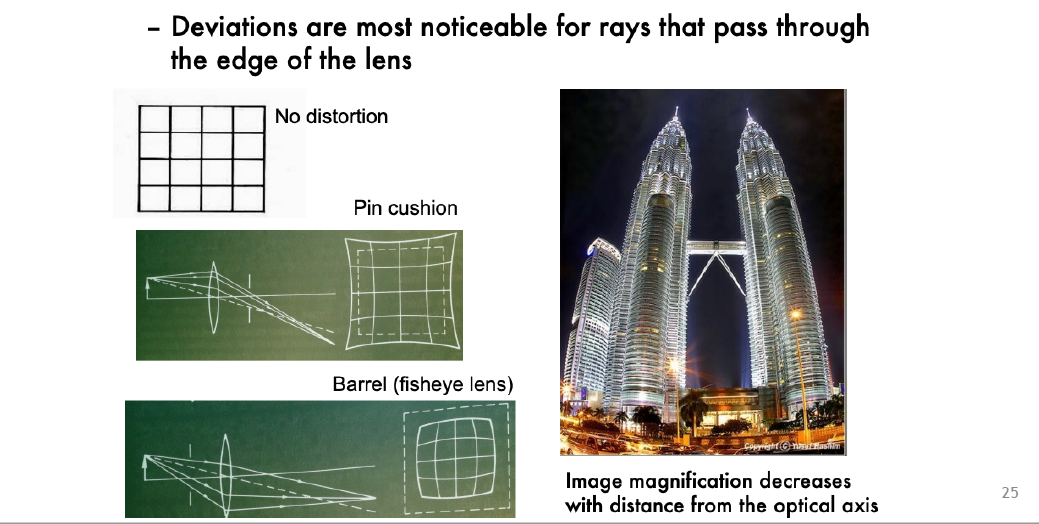
- 虚焦/桶形畸变
- 两种相机参数:Intrinsics,相机的内在参数,制造好就不变了;Extrinsics,外在参数,随空间位置和朝向变化
Intrinsics
回顾刚才建立的Model \displaystyle \left\{ \begin{aligned}x^\prime = f \frac{x}{z} \\ y^\prime = f \frac{y}{z}\end{aligned}\right., 我们一方面令相纸原点为 \displaystyle (c_{x}, c_{y}), 一方面乘上 \displaystyle (k, l) 把量纲化为pixel,并为了方便令 \displaystyle fk=\alpha, fl=\beta,两个常量的量纲都是 [pixel] 从而得到相机模型 \displaystyle (x, y, z) \implies \left(\alpha \frac{x}{z}+c_{x}, \beta \frac{y}{z}+c_{y}\right),这是一个非线性变换,因为存在一个「除以z」。我们需要将它表达为矩阵形式,为此,引入齐次坐标(Homogeneous Coordinate),齐次坐标 \displaystyle \begin{bmatrix}x \\ y \\ w\end{bmatrix}对于欧几里得坐标 \displaystyle \left(\frac{x}{w}, \frac{y}{w}\right),就得到投影矩阵 \displaystyle P^\prime=\begin{bmatrix}\alpha x+c_{x}z \\ \beta y+c_{y}z \\ z\end{bmatrix}=\begin{bmatrix}\alpha & 0 & c_{x} & 0 \\ 0 & \beta & c_{y} & 0 \\ 0 & 0 & 1 & 0\end{bmatrix}\begin{bmatrix}x \\ y \\ z \\ 1\end{bmatrix}, 投影矩阵\displaystyle M 中除去非0列的 \displaystyle 3\times 3 矩阵 \displaystyle K 蕴含了所有相机的内参信息,投影过程也简化为 \displaystyle P^\prime = MP=K\begin{bmatrix}I & 0\end{bmatrix}P
Extrinsics
为什么上面的推导没有任何外参?我们也在图形学中接触了,刚才的投影矩阵 \displaystyle M 是从 观察空间 到屏幕空间的,\displaystyle (x, y,z) 的原点是相机,所以我们只用再引入从 世界空间 到观察空间的变换矩阵就可以了
回顾 \displaystyle 3\times 3 旋转矩阵 \displaystyle R 满足的条件:不含镜像的正交矩阵 \displaystyle \Leftrightarrow \displaystyle R^\top R=I,\det(R)=+1 ;观察空间/相机坐标系满足 \displaystyle \begin{bmatrix}x_{cam} \\ y_{cam} \\ z_{cam}\end{bmatrix}=R\begin{bmatrix}x \\ y \\ z\end{bmatrix}+T,再写成齐次的就是 \displaystyle \begin{bmatrix}x_{cam} \\ y_{cam} \\ z_{cam} \\ 1\end{bmatrix}=\begin{bmatrix}R_{3\times 3} & T_{3\times 1} \\ 0 & 1\end{bmatrix}\begin{bmatrix}x \\ y \\ z \\ 1\end{bmatrix},左乘前面Intrinsics的成分即 \displaystyle P^\prime_{3\times 1}=K_{3\times 3}\begin{bmatrix}R & T\end{bmatrix}_{3\times 4}P_{4\times 1},得到的齐次坐标转换为欧几里得坐标即可;结果的相机模型是一个从世界空间到屏幕空间的变换矩阵,它保直线,不保平行,近大远小。
如果所有物点都离相机特别远,我们就近似认为\displaystyle z是一个常数,此时得到的变换成为Weak Perspective Projection,它是纯线性的(它是一个正交投影?),好算。
(好吧,老师接下来立刻介绍了正交投影)Orthographic正交投影是完全保长度的变换,可以测量物体的真实高度
Camera Calibration
Problem
分析\displaystyle K,R,T: 合并它们三个是这么一坨东西
或者关注原始定义
\displaystyle T有3个自由度,\displaystyle R事实上只有3个自由度,\displaystyle K有\displaystyle \alpha, \displaystyle \beta, \displaystyle u_{0}, \displaystyle v_{0}, \displaystyle z 5个自由度,求解\displaystyle M本质是从图片求解11个变量。我们引入 校准架 (Calibration rig),认定世界坐标系就是这个校准架。给定了定位点 \displaystyle P_{1}\dots P_{n},具有
- 已知的校准架上的坐标
- 已知的相片上的坐标
我们至少要让 \displaystyle n=6,即具有6个correspondences,一个 \displaystyle P 有 \displaystyle (x,y) 可以列 2 个方程,12 个方程求解 12 个变量;一般会取大于 6 的 \displaystyle n 交叉验证。
Solution
=== 推理 ===> 得到所要求解的方程即是 \displaystyle \boldsymbol{Pm}=0, 其中 \displaystyle \boldsymbol{m}=\begin{bmatrix}m_{1}^\top \\ m_{2}^\top \\ m_{3}^\top\end{bmatrix}_{12 \times 1}, 那和以前求解最小二乘法一样,我们可以用 SVD Minimize \displaystyle |\boldsymbol{Pm}|^2, under constraint that \displaystyle |m|^{2}=1。P SVD 分解为 \displaystyle UDV^\top,V 的最后一个 column 就会给出 \displaystyle \boldsymbol{m},进而得到 \displaystyle K, R, T
要注意至少需要两个不平行的棋盘格来求解,这是因为 \displaystyle K 蕴含了 FoV,而你可以注意到单个棋盘格是无法确定 FoV 的,你就知道了 \displaystyle K 求不出。
我们当前的 Calibration 是基于近轴折射模型的,对一个大视场角的相机你必须进行畸变矫正,这超出了本节的范围。
Example
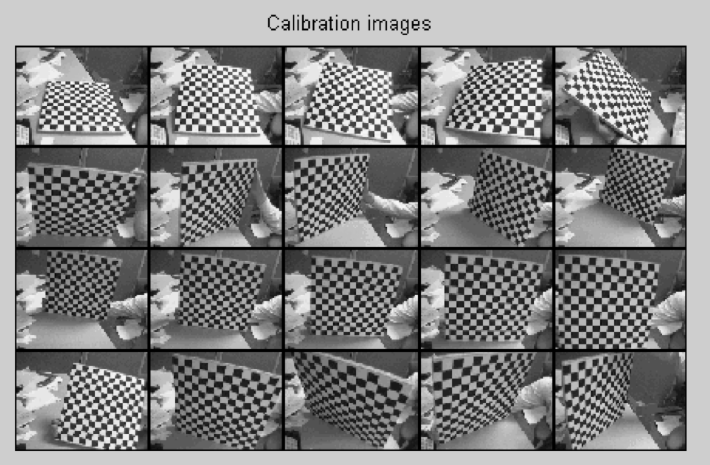
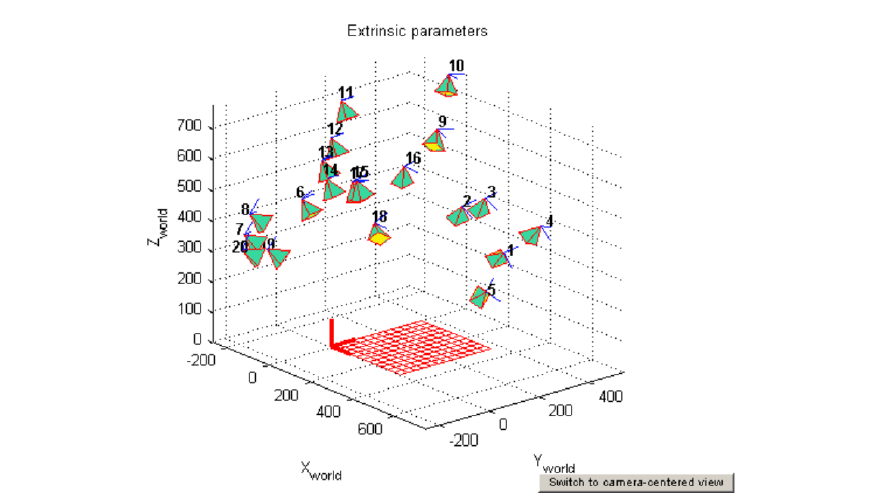
Metrics
给出测试集,包含标注好的3d和2d位置,用预测的3d位置和标注求例如MSE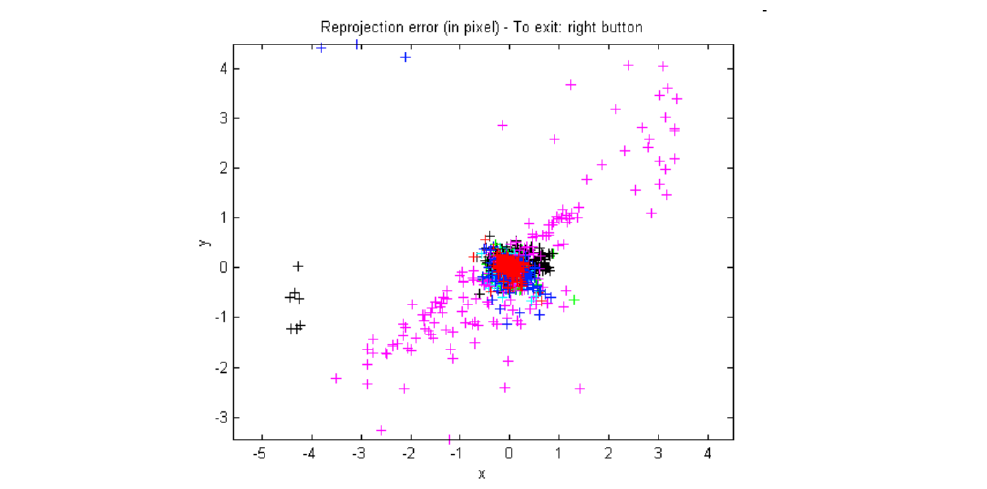
对上面的error,误差很多集中在1个pixel内,这很准了;紫色的棋盘可能...
- 交叉点标注有问题
- 更可能是\displaystyle R,T有问题,因为\displaystyle K是和其他棋盘共享的
Depth Image
Depth 是 \displaystyle H\times W\times 1 的数据,激光雷达给的原始数据是 ray depth(球坐标系),但我们一般谈论的深度图存储的实际上是 z depth(柱坐标系)!
Depth Image必须知道Intrinsics才能转换成 \displaystyle (x,y,z),所以并非真正的3D data;当我们把depth image back projection成 \displaystyle (x,y,z),才能得到点云。