Depth Image
Review
上节我们已经讲了Depth Image+\displaystyle K,R,T才是真3D,单独的 z depth 不能表示世界坐标系里的距离信息——当你指出图中的这个点 \displaystyle (u,v) 的 z depth 或者 ray depth 是 \displaystyle d,你无法知道它对应真实世界的哪个点,势必要知道相机的intrinsics先back
Sensors
我们简单熟悉Depth Sensors,它们具备(裁切空间)FoV,near plane,far plane参数;其中实验室里经常用到的有 Stereo Sensors(双目相机),如下图左;基于双目改进的 Structural light(结构光)方案如下图右,它有一个 RGB Camera,一个IR Projector(红外投影),两个IR Receiver
Stereo Sensors
最baseline的双目相机得到深度的过程:
- 找到左右眼两个相纸上相同的点
- 进行 \displaystyle y 高度对齐,这时左右眼同一点的位置分别是 \displaystyle u, u^\prime
- \displaystyle u-u^{\prime} 就是视差 disparity
- 用相似就能算出来 z depth
当然还有一个问题是如何找到左右眼的相同点(Correspondence)?可以用一些传统的feature descriptor来匹配相同点(当然也能用神经网络匹配),我们也学过了harris corner detection;
另外,我们也关注到左右眼会存在盲区(只有一只眼睛能看到的图像部分),这样的部分就是missing disparity,我们算不了它的depth
Cons: 很多correspondence的确定是困难又不准确的,想象一块没有纹理的白板,你如何确定哪个点和哪个点对应?就是人眼处理这个task也很难;想象一块镜面/玻璃,面上的同一点左右眼看到的干脆不是同一点了(镜面反射or折射),综上我们觉得
- Stereo方案适用于漫反射表面(diffuse surface/lambertian surface)
- 对白板/镜面/透明,仅仅靠两幅可见光的RGB确定深度根本是不可能的了
Structural Light
那我们自然的想法就是人为地project一些特征(画在无纹理的表面上),就可以解决没有Texture的表面无法定位的问题,这个叫 Active Stereo;
用红外光投射一个便于定位/correspondence的光斑图的方案就是 Structural Light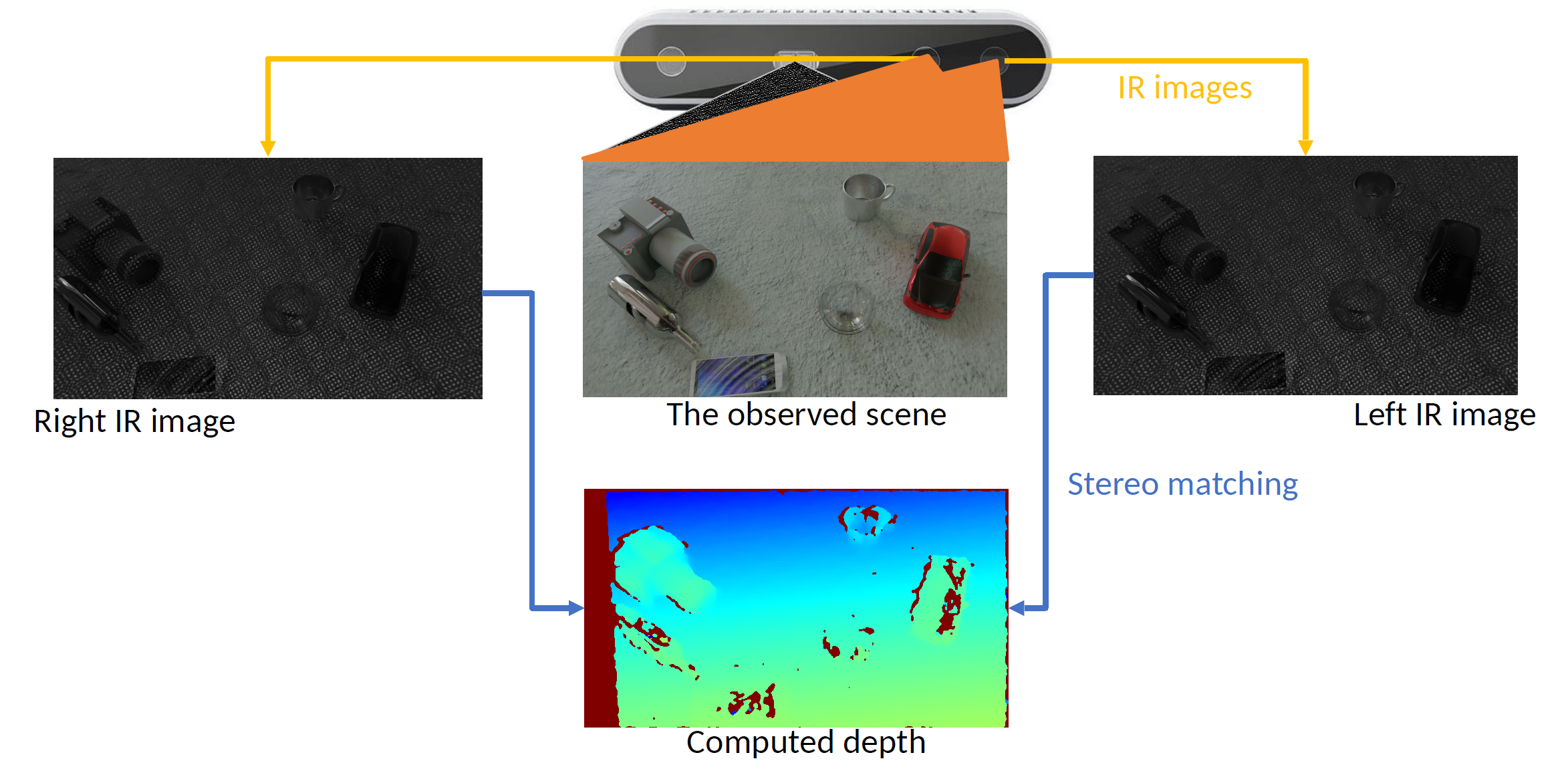
Cons 它也解决不了镜面/透明的问题;另外,很重要的问题是倘若场景里存在更强的 IR Source(比如太阳!),IR Image会被很大地干扰;如果 IR 打在特别黑的吸光材料上,也会失效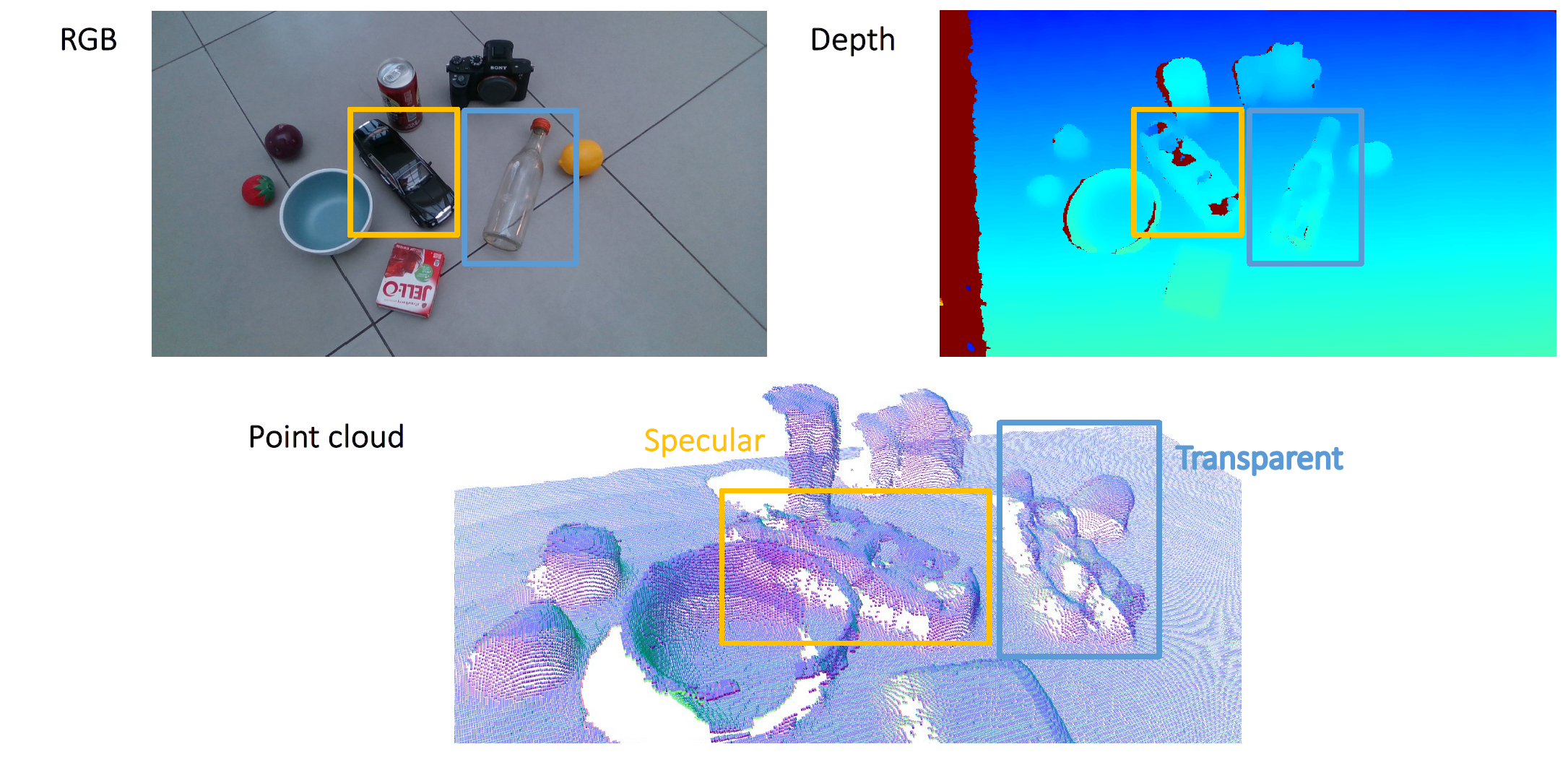
Quiz: 为什么激光雷达得到的是 ray depth,stereo 得到的天生就是 z depth?激光雷达能不能解决镜面/透明问题?
Voxels
Pros
- \displaystyle H\times W\times D 很规整,很好indexed
Cons
- \displaystyle O(n^3) 比 \displaystyle O(n^2) 简直是飞跃,resolution 负担很重,占用很大
Mesh
这个我们可太熟悉了,这部分记录一些零散的知识
- 用三角面/四边面构成几何体的表面,有精度/Resolution/LoD
- 三角面在镶嵌问题上是最优的,四边面用起来是因为建模的时候规整便利
- Mesh 可以看成一个图 \displaystyle \{vertex, edge\},可以表示为
- \displaystyle V=\{v_{1},v_{2},\dots,v_{n}\}\in \mathbb{R}^3
- \displaystyle E=\{e_{1},e_{2},\dots,e_{k}\}\in V\times V,是\displaystyle V和\displaystyle V的一个直积
- \displaystyle F=\{f_{1},f_{2},\dots,f_{m}\}\in V\times V\times V
- 像 PBR, 路径追踪, render pipeline 我们当然也能作为mesh的feature去研究,我们今天就不关心了
- 存储格式:OBJ

有趣的是这里每个triangle的顶点顺序不是随便的,按照右手定则确定面的朝向/法向量 - Geodesic Distance: the shortest distance from one point to the other point on the surface, mesh 上的最短路确定(还挺麻烦的),存在例如 Fast Marching Method 的方法
Point Cloud
- \displaystyle \mathbb{N}^3, 无序的,比起说是一个vector更准确地说是一个set
- Pros 存储友好,易于看懂;Cons 没有surface信息
- “surface是一个二维流形,point cloud 是在surface上的一个采样sampling”
Sampling Strategy: Uniform Sampling
先定义任务:我们希望把Mesh转换成point cloud,为此需要一个保证uniform的采样策略;具体地,这样的策略应该满足
- triangle面积作为选中这个triangle的probability weight
- 在triangle内部,采样的分布应该满足对任意的子面积 \displaystyle S^\prime, 采样点的个数 \displaystyle n 满足 \displaystyle \frac{n}{N}=\frac{S^\prime}{S}
Step 1 很简单,Step 2 我们要想一想:一个可行的策略是把三角面镜像成平行四边形,在长和宽上独立地uniform随机 \displaystyle (a_{1},a_{2}),对应的点 \displaystyle v_{1}a_{1}+v_{2}a_{2} 如果在镜像三角形里,镜像回去就行
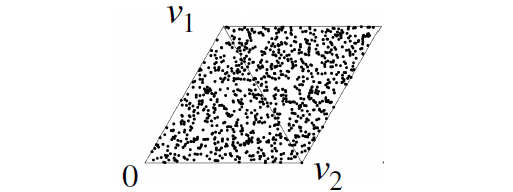
Cons 只是数学期望上uniform,真的均匀并不是很确定的事情,会有的地方因为lucky就是更加密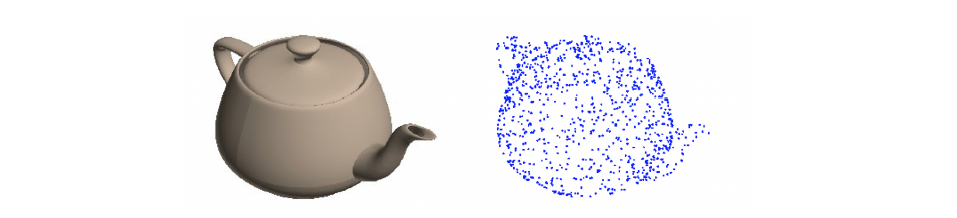
更想要的结果: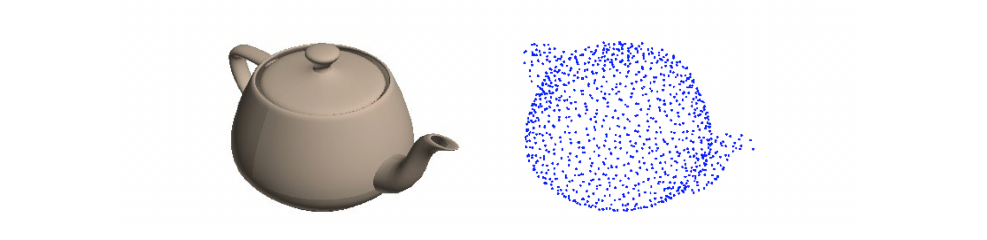
Sampling Strategy: Iterative Furthest Point Sampling
我们重新更好地定义任务(Farthest Point Sampling, FPS):找到一个分布使得 \displaystyle \frac{n(n-1)}{2} 对点两两之间距离的和最大,可惜这被证明是 NP-Hard 问题,难以在多项式时间内解决;一个 greedy approximation method 是 Iterative FPS,第 1 步取一个比目标密度更dense的值n oversample,作为待选;第 2 步先随便找一个点,再找离它最远的点2,再找离这俩最远的点3,...,点k;这个方法大致是 \displaystyle O(nk) 的。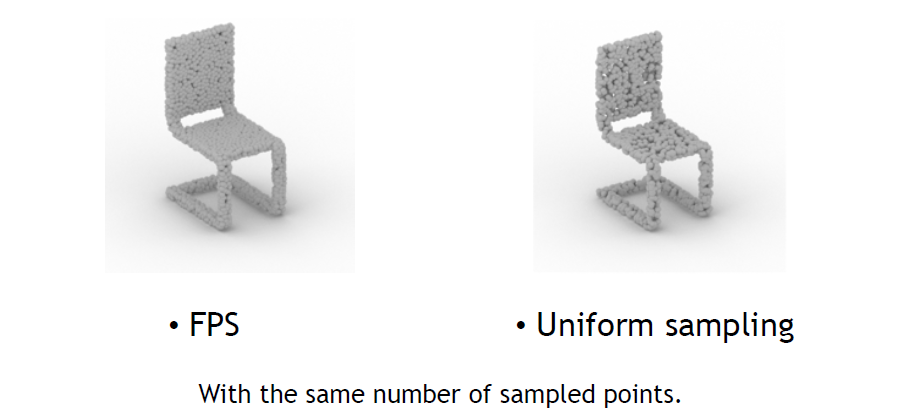
这貌似是老师自己的成果
Distance Metrics
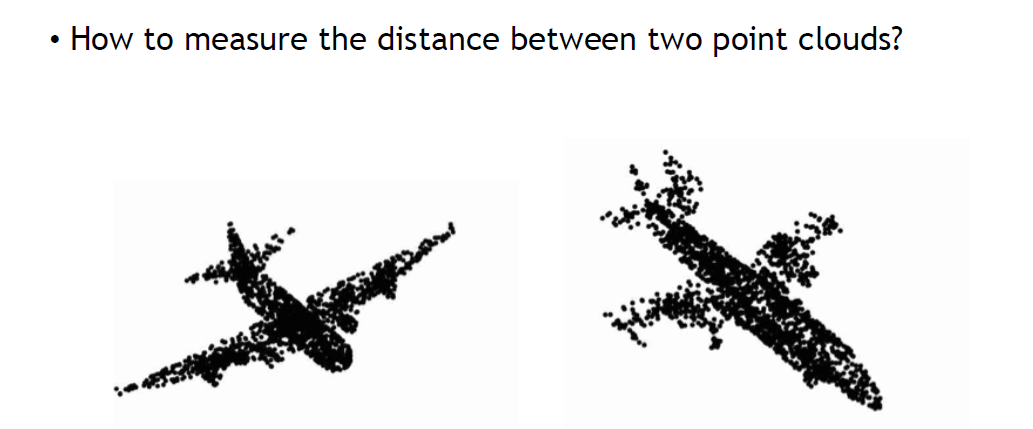
Irregular data 的 distance 是很 tricky 的事情,需要根据具体任务而定;有两个例子:
- Chamfer distance (\displaystyle O(n^2)) define \displaystyle d_{CD}(S_{1}, S_{2})=\sum_{x\in S_{1}}\min_{y\in S_{2}}||x-y||_{2}+\sum_{y\in S_{2}}\min_{x\in S_{1}}||x-y||_{2}
- Earth Mover's distance (hard) define \displaystyle d_{EMD}(S_{1},S_{2})=\min_{\phi:S_{1}\to S_{2}}\sum_{x\in S_{1}}||x-\phi(x)||_{2}, where \displaystyle \phi:S_{1}\to S_{2} is a bijection.
Chamfer 只在意谁和它最近,不存在供求关系所以对sampling是insensitive的;EMD 需要一一配对,如果一个地方供不应求就可能到很远的地方去寻找朋友,所以对sampling是highly sensitive的。
3D Deep Learning
Problem: define CNN for Point Cloud?
我要先胡思乱想一会:首先输入是一堆无序的 \displaystyle (x,y,z),如果说conv是高斯模糊是weight可训练的加权平均,那这里的Conv就应该是 \displaystyle \sum_{i} w_{i}(x_{i}, y_{i}, z_{i}),可以想象它会让一组点在空间聚类(?)映射到另一个点,信息浓缩的任务应该可以完成;问题是 \displaystyle i 指标怎么取?一定不能是1d-CNN那样连续的取i,因为是无序的;如果遵循我们是对空间距离近的一组点同一的处理,那么应该先做一个预排序使得一个连续的\displaystyle i区间对应的点总在一坨?似乎没有什么毛病,这样我们的input_size就是 \displaystyle (C\times 3\times N),相当于一个2d-CNN处理 \displaystyle (3\times n) 的窗口。但是很有问题啊!这个预排序怎么做到呢?2d img只有2个移动方向,要么u,要么v,所以我们遍历了所有的(u, v),但是这里不对!我的预排序会让一个点只出现「窗口大小\displaystyle n」次,我很怀疑能不能捕捉到合适的特征。如果以表面为工作平面,我希望能达到这样的效果?
这样是不是要先根据表面展开point cloud?这会非常复杂...如果以体为单位?
这样似乎每个固定大小体内部点的个数会不同。
\displaystyle 3\times N+MLP的问题:例如先排\displaystyle x,再排\displaystyle y,再排\displaystyle z,随便换两个点feature就全不行了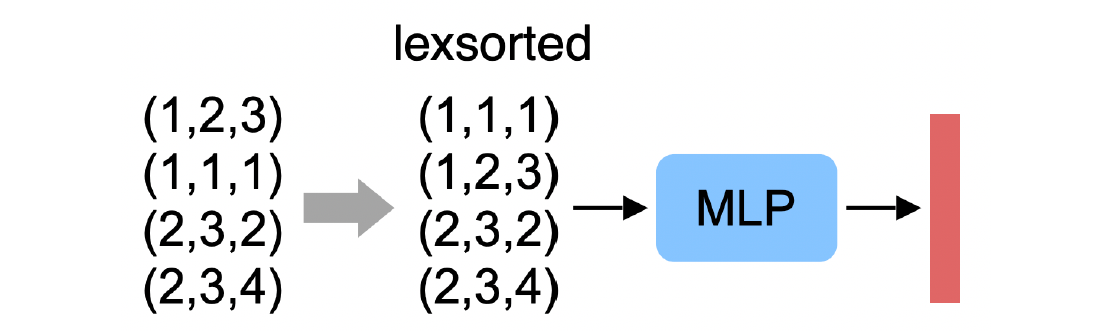
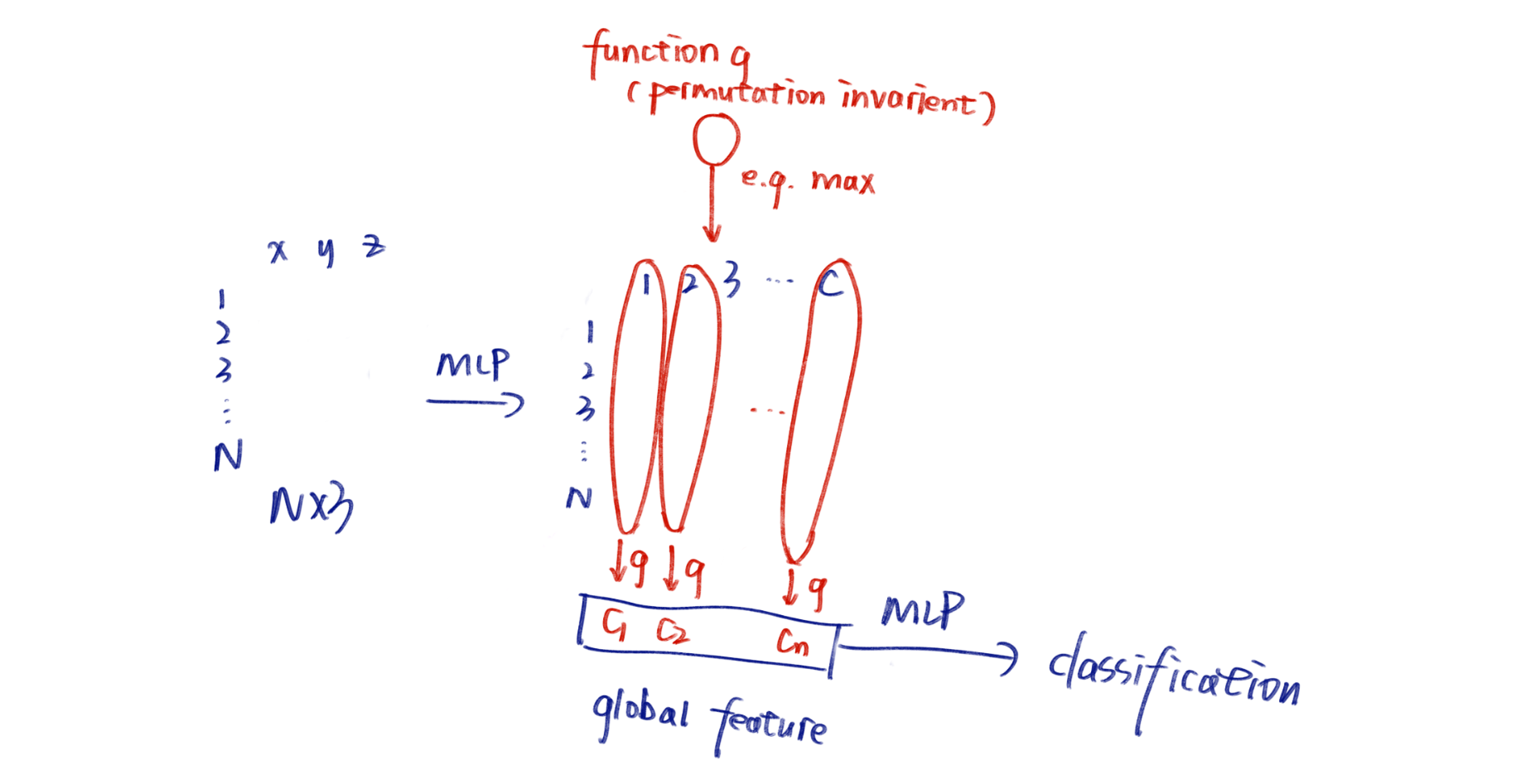
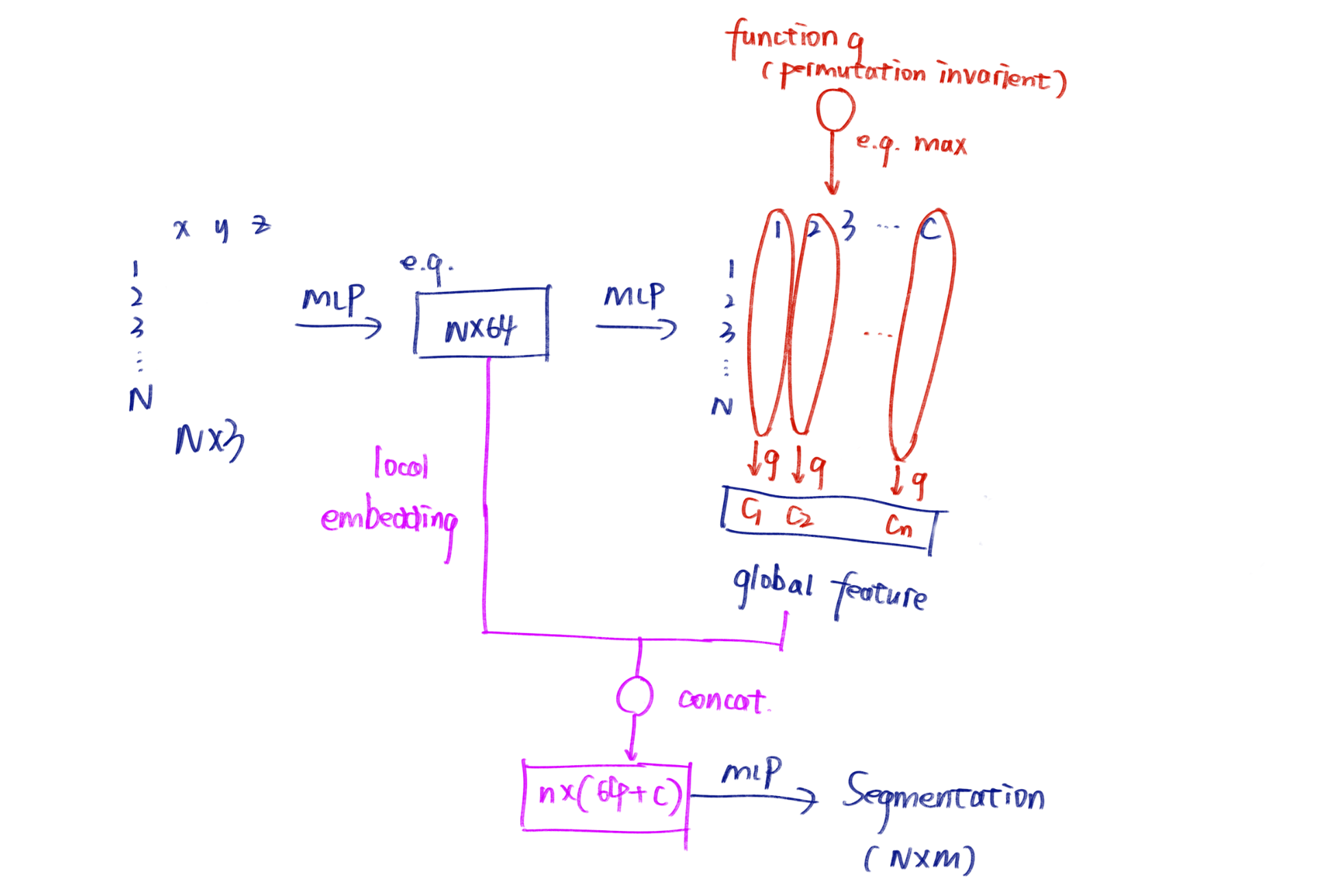
PointNet (Qi et al. 2017, CVPR)
- Symmetric Function: 我们希望使用Permutation invariant的函数(例如sum avg和max)构建一个神经网络;
- 核心想法:
- 其中的transform后来证明是没有用的
神奇的性能:
- params -80%
- FLOPs -88%
- robustness to resolution (less than 2% acc drop with 50% missing data!)
为什么如此robusted?因为它在function g那里丢掉了特别多的冗余信息,可视化说明它自己学会了提取critical point;它对点的总数n也特别robust(这是因为那个很巧妙的C维特征方法完全地permutation invarient)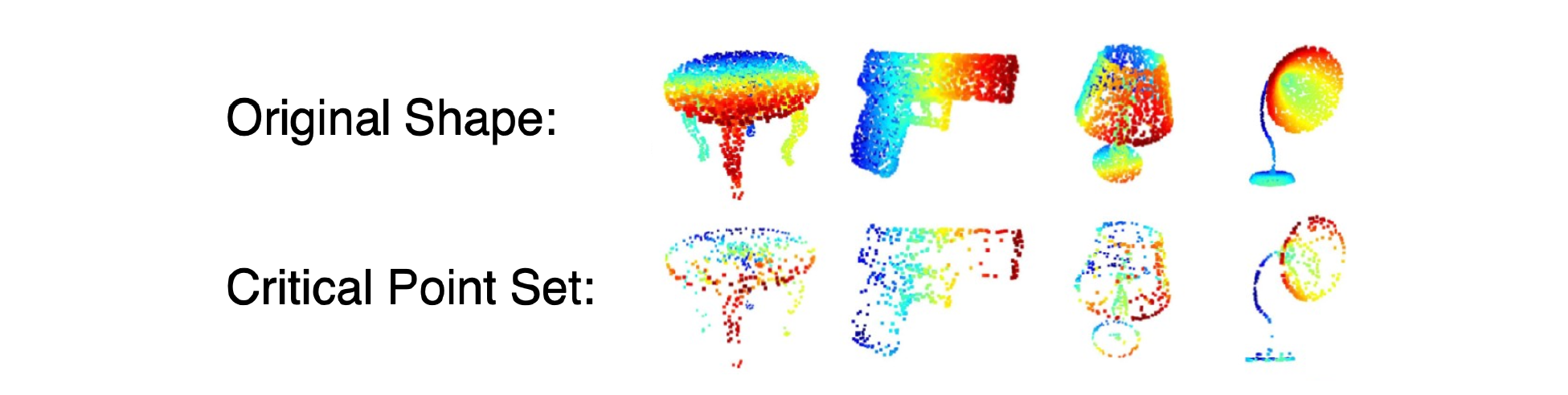
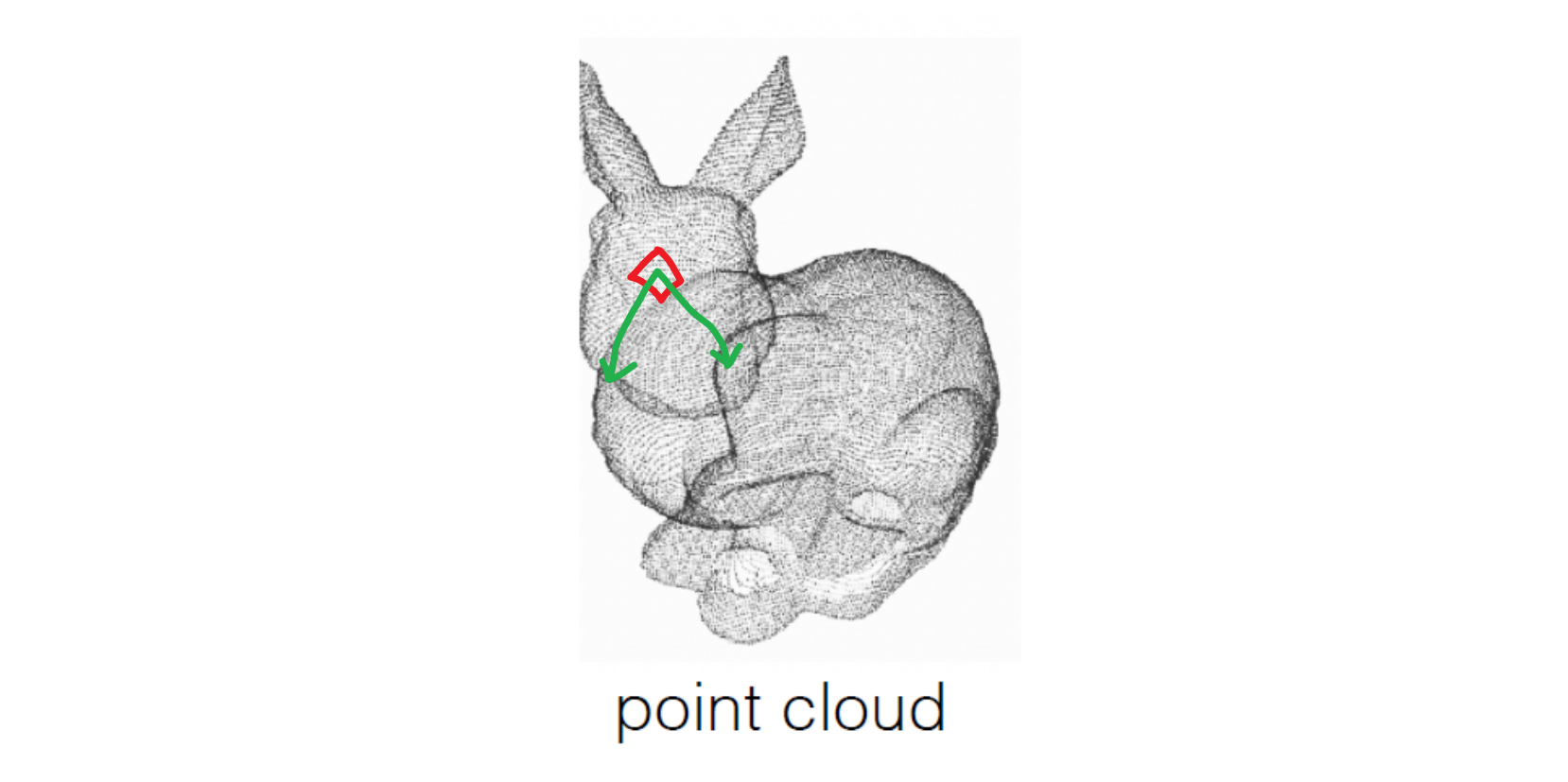
Cons 它和周边的信息不会交互所以不会提取局部特征,较3D CNN没有很好的涨点;所有点云center都对齐到原点,如果所有点向上提高1格,那么所有的feature都变了,结果是很差的;
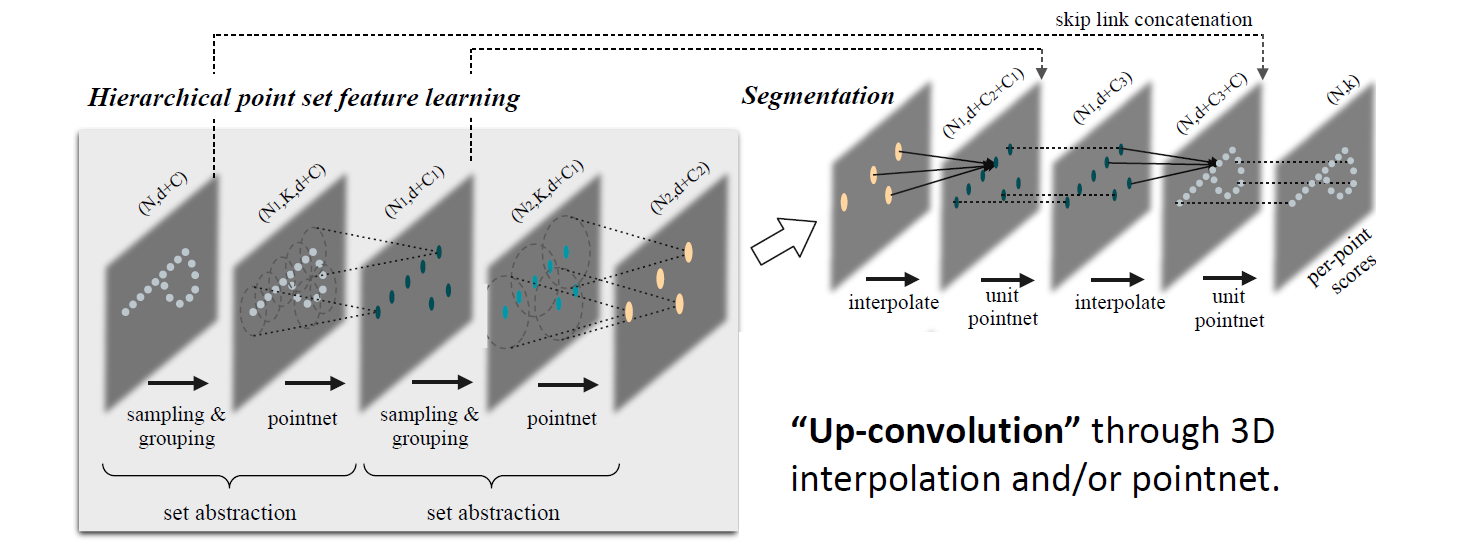
PointNet++ (Qi et al., NIPS 17)
聚焦局部特征的提取 Tl;DR:
- 层级化feature extraction
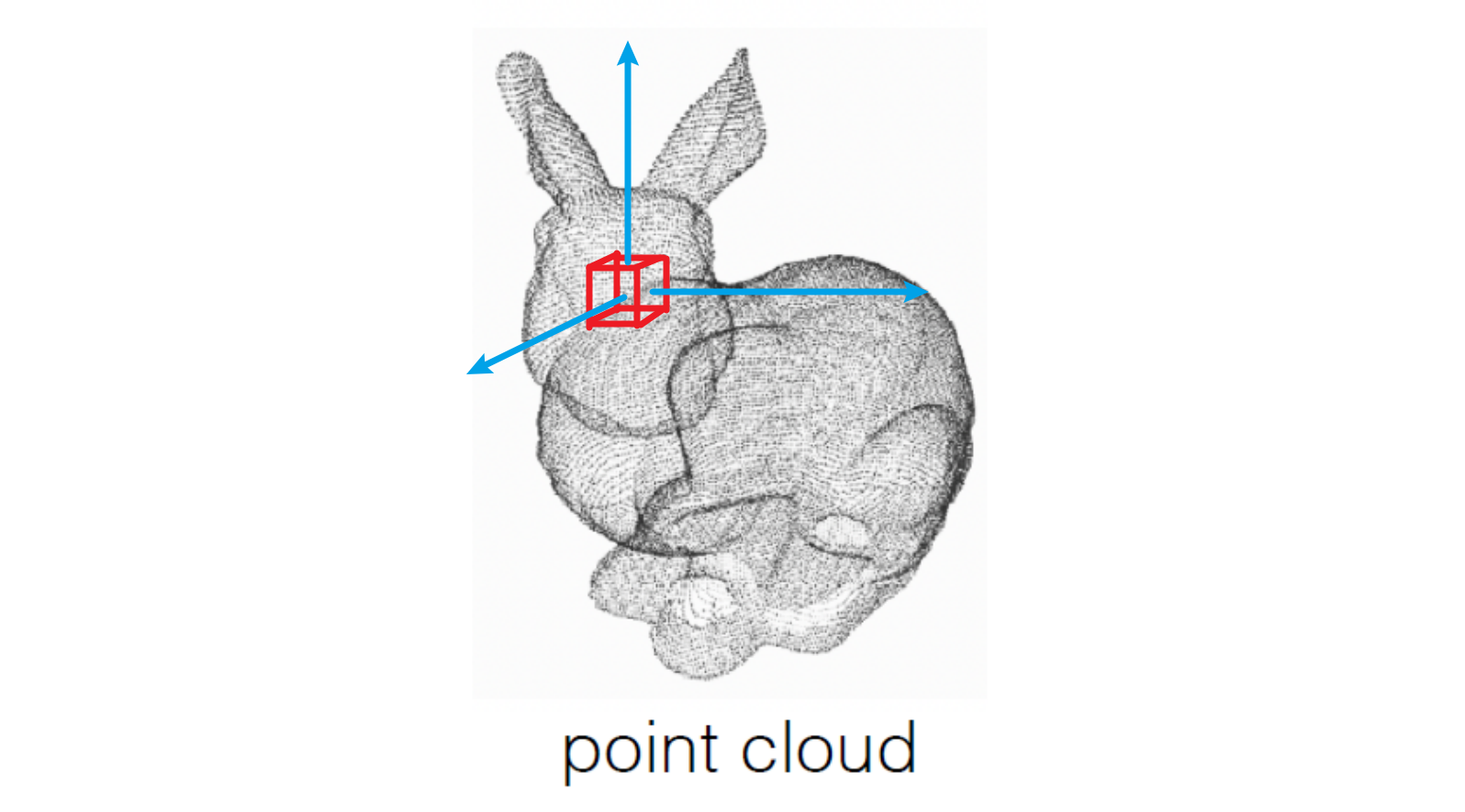
- relative, no absolute coordinates
Ball query
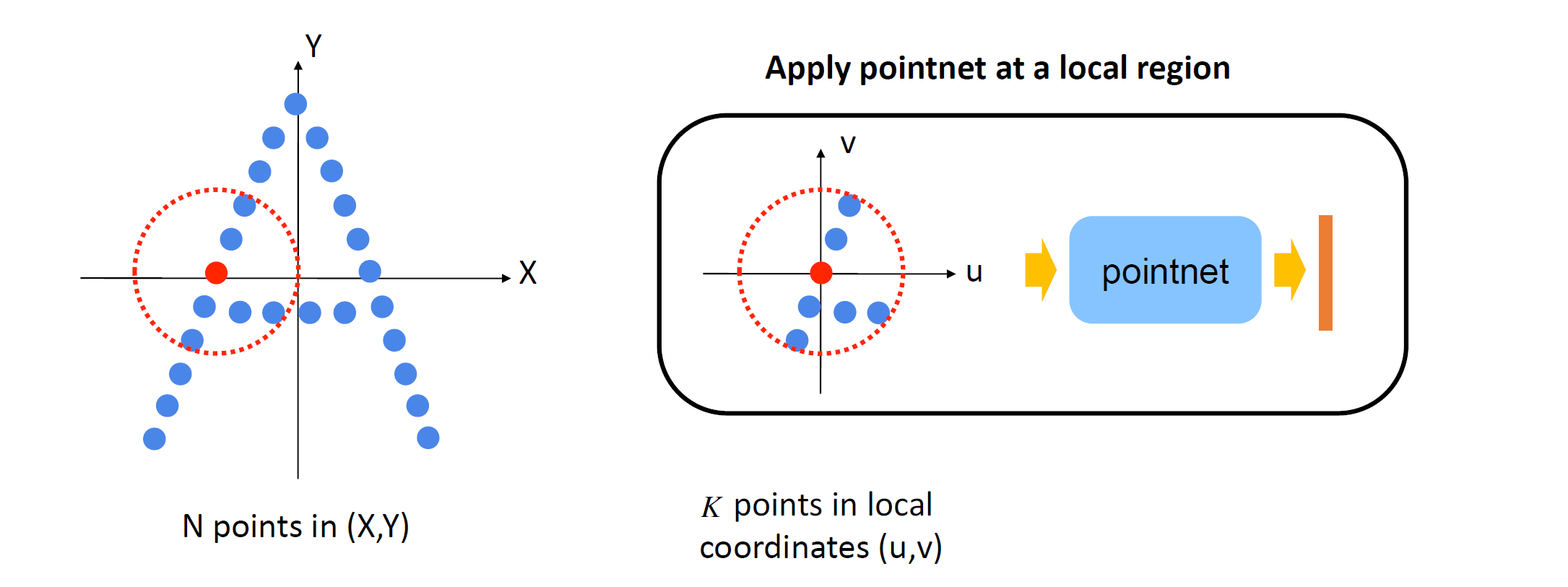
- Ball size: hyperparameter; set max number of points in a ball k
- points > k => random get k
- points < k => copy ans paste some
- K个点的relative coord \displaystyle (u,v) 塞进 PointNet 里得到 local feature \displaystyle f,合并ball center的坐标得到特征点 \displaystyle (x_{0}, y_{0}, f)
这称为一次 Set Abstraction: FPS+grouping+pointnet
Classification

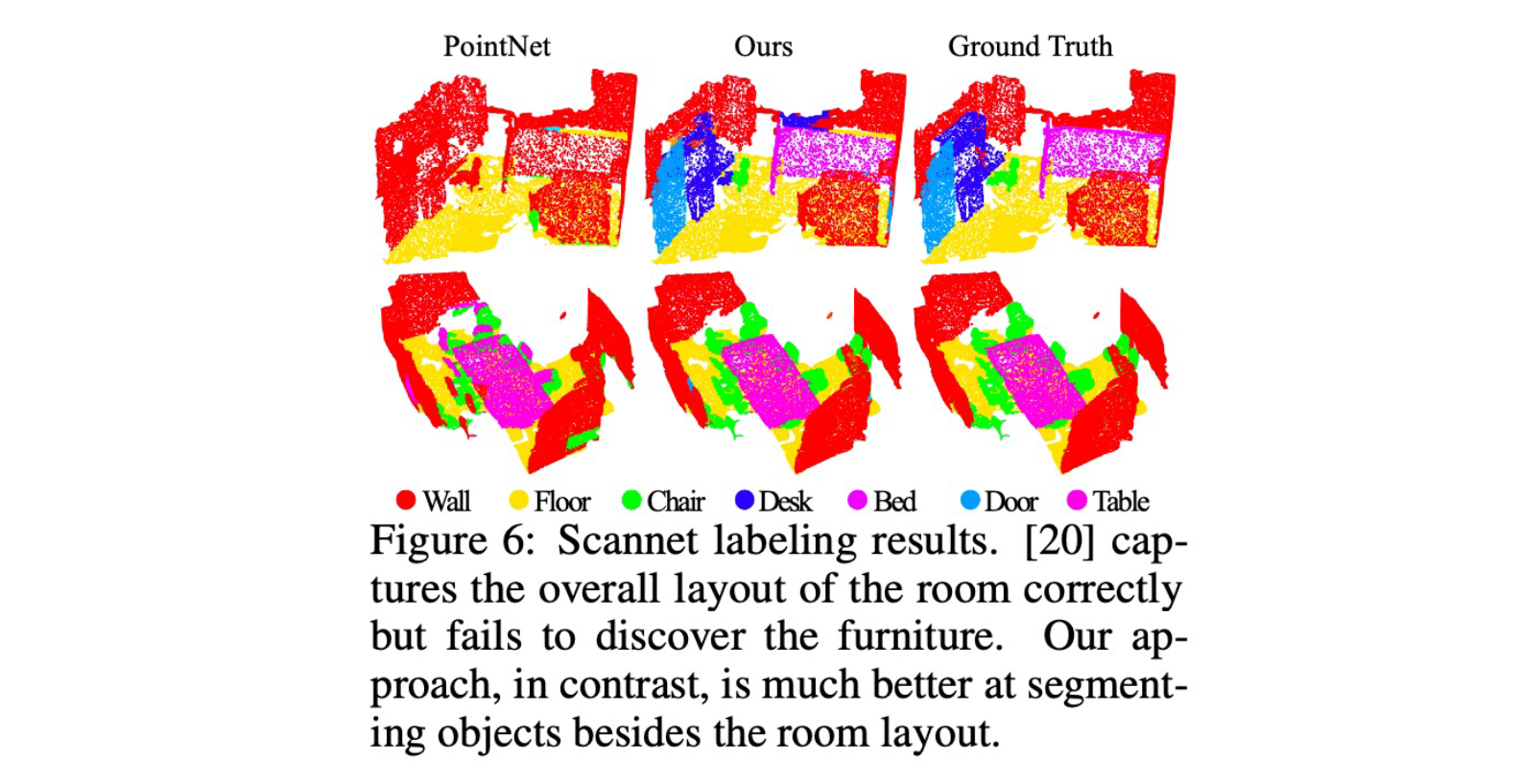
Segmentation
特别好的Segmentation结果